NVIDIA Cosmos 3とは?フィジカルAI世界基盤モデルの機能・3モデル構成・MoTアーキテクチャを完全解説【2026年6月速報】

この記事のポイント
NVIDIA Cosmos 3は、ロボット・自律走行車向けに設計されたオープンな世界基盤モデル(WFM)です。MoTアーキテクチャ・3モデル構成(Edge/Nano/Super)・Cosmos Coalition・料金・ハードウェア要件まで公式情報をもとに整理します。
NVIDIA Cosmos 3は、ロボット・自律走行車・産業ビジョンAI向けに開発されたオープンな世界基盤モデル(World Foundation Model)です。2026年6月1日にCOMPUTEX(GTC Taipei)でJensen Huang氏が発表し、フィジカルAIのトレーニング・評価サイクルを数ヶ月から数日に短縮できる世界初の完全オープンなオムニモデルとして注目されています。
対象読者: ロボット開発者・自律走行エンジニア・AIリサーチャー・フィジカルAIに関心を持つ技術者・AIツールの最新動向を把握したいエンジニア
NVIDIA Cosmos 3とは — フィジカルAIの「共通インフラモデル」

NVIDIA Cosmos 3は、ロボット・自律走行・産業AIなど現実空間で動作するシステム(フィジカルAI)の開発基盤として設計されたモデルです。NVIDIA公式の定義によれば、「ビジョン推論・ワールド生成・アクション予測を1つのシステムに統合した、世界初の完全オープンなオムニモデル」とされています。
モデルウェイトはOpenMDW 1.1ライセンスのもと無料・商用利用可能な形で公開されており、エンタープライズ向けには NIM(NVIDIA Inference Microservice)経由のデプロイも選択できます。2026年6月時点でCosmos 3 Nano(16B)とCosmos 3 Super(64B)が公開済みで、エッジデバイス向けのCosmos 3 Edge(4B)は近日公開予定です。
項目 | 内容 |
|---|---|
開発元 | NVIDIA Corporation |
発表日 | 2026年6月1日(COMPUTEX 2026 / GTC Taipei) |
カテゴリ | フィジカルAI / 世界基盤モデル(World Foundation Model) |
提供形態 | オープンモデル(ウェイト無料公開)+ NIM マイクロサービス(エンタープライズ) |
ライセンス | OpenMDW 1.1(Linux Foundation 管理、商用利用可) |
公開状況 | Nano(16B)・Super(64B)公開済み、Edge(4B)は近日予定 |
モデル配布元 | |
公式ページ |
フィジカルAIとは何か — テキスト生成AIとの決定的な違い

Cosmos 3 を正確に理解するには、まず「フィジカルAI」という概念を把握する必要があります。現時点では日本語の解説記事でもこの区別が曖昧なものが多いため、ここで整理します。
ChatGPTやClaudeのような「テキスト生成AI」は、人間が言語で入力した内容に対してテキスト・画像・音声を生成します。一方、フィジカルAIは「現実世界で物理的に動くシステム(ロボット・車・工場設備)が正しく行動できるようにするためのAI」です。
比較項目 | テキスト生成AI(ChatGPT / Claude等) | フィジカルAI(Cosmos 3等) |
|---|---|---|
主な処理対象 | 言語・画像・音声の生成 | 現実空間での行動・動作の計画と実行 |
出力形式 | テキスト・画像・音声 | ロボット制御信号・動画・行動系列(軌跡) |
主な用途 | 文章作成・翻訳・コーディング支援 | ロボット制御・自律走行・工場自動化 |
物理法則の理解 | 原則不要または補助的 | 必須(重力・衝突・因果関係・時系列) |
代表モデル | GPT-4o、Claude、Gemini | Cosmos 3、Alpamayo 2、GR00T N1 |
フィジカルAI開発の最大の課題は、学習データの収集コストにありました。たとえばロボットアームが「箱をつかんで棚に置く」動作を習得するためだけに、実機での試行を何千回も繰り返す必要があります。Cosmos 3は物理法則に整合した合成動画を大量生成する機能を持つことで、このサイクルを「数ヶ月から数日」に圧縮することが可能です。
ARK Invest の分析では、フィジカルAI市場は2040年までに最大24兆ドル規模に拡大する可能性があるとされています。NVIDIA はこの市場の「共通インフラ層」を押さえることを戦略目標として Cosmos 3 を展開しています。
NVIDIA Cosmos 3でできること — 3つのコア機能
Cosmos 3が「オムニモデル」と呼ばれる理由は、通常は別々のシステムが担当していた3つの機能を1モデルにネイティブ統合しているからです。
1. ビジョン推論(Vision Reasoning)
カメラや各種センサーから取得した映像を解析し、物体の動き・空間的関係・因果関係・時間的変化を理解します。「ベルトコンベア上の製品に傷があるか」「交差点の歩行者が2秒後にどう動くか」といった複雑な状況推論が対象です。
主な活用場面:
- 製造ラインの品質検査(傷・変形・異物混入の自動検出)
- スマートシティのカメラフィード監視(群衆分析・異常行動の検知)
- 自律走行車の周辺環境リアルタイム認識
2. ワールド生成(World Generation)
テキスト・画像・動画・音声を条件として入力し、物理的に整合した未来シナリオの動画を生成します。「このロボットがこの行動をとると、次の0.5秒間はどうなるか」を視覚的にシミュレーションできます。
最も重要な使い方が「合成データ生成」です。衝突・落下・稀なエッジケースといった実機で再現するのが危険または困難なシナリオを、物理的に正確な映像として大量生成し、AIモデルの訓練データとして活用します。これがトレーニングサイクル短縮の核心機能です。
3. アクション予測(Action Prediction)
言語で与えた指示(「赤い箱を棚の右端に置いて」)を、ロボットが実際に動かせる数値データ(関節角度・グリッパー位置・移動軌跡など)に変換して出力します。この機能により、言語指示から直接ロボット行動への橋渡しが可能になります。
対応モダリティ(入出力の種類)
入力形式 | 出力形式 |
|---|---|
テキスト | テキスト |
画像 | 画像 |
動画 | 動画 |
環境音 | 環境音 |
アクション(数値) | アクション系列(軌跡) |
この「全モダリティを統合した完全オープンモデル」という組み合わせは、2026年6月時点でCosmos 3が業界初とNVIDIAは主張しています。
3モデル構成の詳細と使い分け
出典: HuggingFace Blog / NVIDIA 公式
Cosmos 3は2026年6月時点で3サイズのモデルで展開されています。各モデルはReasonerとGeneratorという2つのタワーで構成されており、総パラメータ数はバックボーンの約2倍になります。
モデル | 総パラメータ | Reasoner | Generator | 主な用途 | 公開状況 |
|---|---|---|---|---|---|
Cosmos 3 Edge | 4B | 2B | 2B | エッジデバイス・組み込み・リアルタイム推論 | 近日公開予定 |
Cosmos 3 Nano | 16B | 8B | 8B | ワークステーション・因果推論・ロボット軌跡計画 | 公開済み |
Cosmos 3 Super | 64B | 32B | 32B | データセンター・大規模合成データ生成・高品質ポストトレーニング | 公開済み |
Cosmos 3 Edge(4B)— 近日公開予定
Jetson などの組み込みデバイス・エッジハードウェア向けに設計された最小サイズのモデルです。工場や物流倉庫の現場に設置したロボット本体に搭載し、クラウドとの通信遅延なしでリアルタイム推論することを主な用途として想定しています。2026年6月時点では公開されておらず、NVIDIA は「近日公開予定」のみを発表しています。
Cosmos 3 Nano(16B)— 現在最も試しやすいモデル
ワークステーション1台で動かせる現実的なサイズです。NVIDIA RTX PRO 6000(32GB VRAM)での動作が確認されており、個人・中小規模のロボティクス研究チームが試験利用を始めるのに最適なサイズです。因果推論・CoT(思考の連鎖)・ロボット軌跡計画に向いています。
セットアップ時の重要な注意点(コミュニティ報告より): Nano(16B)であってもTransformer部分だけでVRAM 29GB超を消費します。RTX 5090(32GB)でも動作しますが、他のGUIアプリを同時起動せずヘッドレス運用が推奨されます。また device_map="auto" には非対応で、enable_sequential_cpu_offload() による逐次CPUオフロードが必要です。
Cosmos 3 Super(64B)— 本格的な産業・研究用途向け
データセンター向けの最大サイズモデルです。VRAM 120GB以上相当のリソースが必要で、H100(Hopper)またはBlackwellアーキテクチャのGPU環境が前提となります。大規模な合成データ生成、本番ロボットのポストトレーニング、最高品質のワールド生成が主な用途です。
MoT(Mixture-of-Transformers)アーキテクチャの仕組み
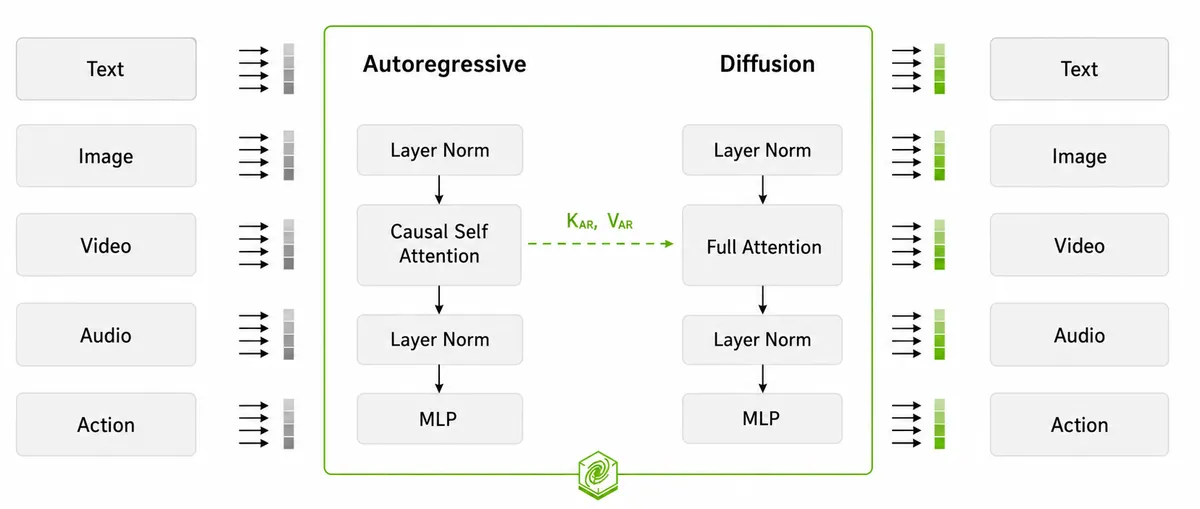
Cosmos 3の技術的な核心は「2タワー型 Mixture-of-Transformers(MoT)アーキテクチャ」にあります。従来の世界モデルが「推論」か「生成」のどちらか一方に特化していたのに対し、Cosmos 3は両者を1つのシステムに統合しています。
Cosmos 3 = [Reasoner Tower(推論担当)] + [Generator Tower(生成担当)]Reasoner Tower(推論担当)
- 方式: 自己回帰型(Autoregressive)Transformer
- 初期化ベース: Qwen3-VL(Alibaba Cloud 製 VLM)の重みを使用
- 役割: 入力された映像・テキストから、物体の動き・空間関係・因果関係・時間的変化を「理解」し、自然言語で推論を展開する
Reasonerは「何が起きているか」「次に何が起きるか」を言語的に推論する担当です。人間が「状況を観察して考える」役割に相当します。
Generator Tower(生成担当)
- 方式: 拡散型(Diffusion-based)Transformer
- 役割: Reasonerの「理解・推論結果」を条件として受け取り、物理的に整合した未来の動画・行動系列を「生成」する
GeneratorはReasonerが理解した内容をもとに、実際の映像データやロボットの動作指令として「具現化」する担当です。
MoTによる統合の仕組み
入力シーケンスを「自己回帰サブシーケンス(推論処理用)」と「拡散サブシーケンス(生成処理用)」に分割し、それぞれの専門タワーが担当します。この分割により、総パラメータ数はバックボーン単体の約2倍になりますが、推論と生成が役割分担しながら連動するため、単純な大型モデルより効率的です。
HuggingFace の diffusers ライブラリでは Cosmos3OmniPipeline として統合されており、数行のコードで利用を開始できます。ただし現時点では PyPI の安定版(diffusers)には未収録で、git 版のインストールが必要です(詳細はNVIDIA Developer Blogを参照)。
ベンチマーク成績 — 主要8項目でオープンモデル中1位
公式発表によると、Cosmos 3は主要なフィジカルAIベンチマークでオープンモデル中1位を記録しています。
カテゴリ | ベンチマーク名 | 公式発表成績 |
|---|---|---|
物理AIワールド生成 | Physics-IQ | 1位(オープンモデル中) |
物理AIワールド生成 | PAI-Bench | 1位 |
物理AIワールド生成 | R-Bench | 1位 |
アクションポリシー | RoboLab | 1位 |
アクションポリシー | RoboArena | 1位 |
視覚理解 | VANTAGE-Bench | 1位 |
視覚理解 | TAR | 1位 |
テキスト→画像生成精度 | Artificial Analysis Leaderboard | 1位 |
評価上の注記: これらはNVIDIA公式発表に基づく数値で、独立した第三者機関による評価結果ではありません。また「オープンモデル中」という条件付きで、GPT-4V等のクローズドモデルとの直接比較ではありません。実際の用途での性能は、タスク・データ・環境によって変わります。
Cosmos Coalition — オープンエコシステム戦略

出典: HuggingFace Blog / NVIDIA 公式
NVIDIA は Cosmos 3 の発表と同時に、Cosmos Coalition(コスモス連合)を設立しました。「オープンな世界モデルの開発加速・相互運用性向上・産業横断での標準化」を目的とするグローバルエコシステム構想です。
設立メンバー6社
企業名 | 専門分野 | Cosmos 3 との関係 |
|---|---|---|
Agile Robots | ヒューマノイドロボット | Thor 3・FR3 への Cosmos 3 統合を開始済み |
Black Forest Labs | 画像生成AI(FLUXモデル開発元) | 世界生成品質の向上 |
Generalist | AIエージェント | マルチモーダルエージェント統合 |
LTX | 動画生成AI | 合成動画データの強化 |
Runway | 動画生成AI | クリエイティブ世界生成 |
Skild AI | 汎用ロボット基盤モデル | ロボット行動モデルの標準化 |
参加形態はモデル・研究成果・評価手法の相互提供によるオープンコラボレーションです。
Coalition の戦略的意義
単なる「パートナーリスト」ではなく、NVIDIA がフィジカルAIの「プラットフォーム標準」を主導しようとしている構造を示しています。
- NVIDIAの狙い: モデルをオープン無料公開 → エコシステムを拡大 → H100/Blackwellシリーズの需要を次世代以降まで継続させる
- Coalitionメンバーの利点: NVIDIA の巨大なGPUリソース・プレスキット・販売網へのアクセス
- 業界全体の利点: 互換性のある評価基準・ポストトレーニングスクリプトの共有による開発コスト削減
Coalitionは設立時点で6社と規模は小さいですが、採用企業が拡大するにつれてCosmos 3の評価・改善サイクルが加速する設計になっています。NVIDIA が公開したポストトレーニングスクリプトとオープンソースの評価フレームワークも、この方向性を支えています。
採用企業・導入事例(2026年6月発表時点)
NVIDIA はCOMPUTEX 2026の発表に合わせて、複数の企業によるCosmos 3の採用を公表しました。
ロボティクス分野
企業名 | 国・地域 | 用途 |
|---|---|---|
Agile Robots | ドイツ | ヒューマノイド Thor 3・産業アーム FR3 への統合 |
Doosan Robotics | 韓国 | 産業用ロボット制御の高度化 |
LG Electronics | 韓国 | 家庭・産業ロボット向け活用 |
Samsung | 韓国 | ロボティクス関連用途 |
Skild AI | アメリカ | 汎用ロボット基盤モデルの開発 |
自動運転分野
企業名 | 国・地域 | 用途 |
|---|---|---|
Li Auto(理想汽車) | 中国 | 自律走行向け合成データ生成 |
ビジョンAI分野
企業名 | 用途 |
|---|---|
Centific | ビジョン分析 |
Fogsphere | スマートシティ向けカメラ分析 |
Linker Vision | 数千台カメラフィードの異常検知 |
Milestone Systems | 映像監視システムへの統合 |
Yuan | 映像解析 |
現時点の情報について: 上記は公式発表時点(2026年6月)での採用企業リストです。日本企業の具体的な導入事例は現時点では公式から確認されていません。
料金体系と入手方法
Cosmos 3 のモデルウェイト自体は無料公開されていますが、実際に動かすにはGPUコストが発生します。「無料」の範囲と「有料」が発生するポイントを正確に把握することが重要です。
料金体系の整理
利用形態 | 料金 | 条件・備考 |
|---|---|---|
モデルウェイト(HuggingFace/GitHub) | 無料 | OpenMDW 1.1 ライセンス、商用利用可 |
build.nvidia.com での試験利用 | 無料(クレジット制) | NVIDIAアカウント登録が必要、APIアクセス |
NVIDIA NIM マイクロサービス | 有料 | NVIDIA AI Enterprise 契約が必要、コストは要見積もり |
クラウドパートナー(Azure, CoreWeave, Baseten 等) | GPU時間単価による | 各プラットフォームの料金体系に依存 |
「無料」の実態 — GPU費用が実質コスト
モデルウェイト = 無料。しかし実行に必要な GPU = 高額です。
Cosmos 3 Nano(16B)を動かすには、VRAM 32GB以上のGPU(RTX PRO 6000・RTX 5090)が必要です。国内市場での価格は20万円超の水準で、クラウド(H100インスタンス)を使う場合は1時間あたり数ドル〜数十ドルが発生します。
Cosmos 3 Super(64B)の本格利用は、H100/Blackwellクラスの複数GPU環境が前提で、クラウドコストは月数万〜数十万円規模になる可能性があります。
入手方法(ステップ)
- まず試したい場合: build.nvidia.com でクレジット枠内のAPI試験利用
- ローカルで動かす場合: HuggingFace(nvidia/Cosmos-3-Nano) からウェイトをダウンロード
- GitHub活用: github.com/nvidia/cosmos でポストトレーニングスクリプト・評価フレームワークを取得
- 本番デプロイ: NVIDIA AI Enterprise 契約のもとで NIM マイクロサービスを利用
ハードウェア要件と導入の難易度
ハードウェア要件(確認済み情報)
モデル | 最低VRAM目安 | 推奨ハードウェア | 参考クラウド環境 |
|---|---|---|---|
Edge(4B) | 未公開(近日発表予定) | Jetson 等エッジデバイス | — |
Nano(16B) | 32GB VRAM | RTX PRO 6000 / RTX 5090 | H100 1枚(40GB)相当 |
Super(64B) | 120GB VRAM 以上 | H100 / Blackwell(複数GPU) | H100 4枚以上相当 |
※Nano(16B)はTransformer部分だけでVRAM 29GB超を消費することがコミュニティで報告されています。32GB VRAMのGPUでも余裕は少なく、ヘッドレス運用が推奨されます。
セットアップ難易度:中〜高
Cosmos 3 Nano(16B)をローカルで動かすための要件(コミュニティ報告より):
- git 版 diffusers のインストール: PyPI 安定版では
Cosmos3OmniPipelineが未収録のため、GitHub版インストールが必要 - CUDA 13.0 + ドライバー 580.x系: 特定バージョンが必要で、既存環境との競合に注意
- メモリアロケーション設定:
PYTORCH_CUDA_ALLOC_CONF=expandable_segments:Trueの事前設定が必要 - CPUオフロード:
device_map="auto"は非対応。enable_sequential_cpu_offload()を明示的に呼び出す - LFSクライアント: HuggingFace から大容量ウェイトをダウンロードするには
git-lfsが必要
まとめ: 「インストールして試す」には専門知識が必要な水準です。初めて触れる場合は、まず build.nvidia.com のAPIクレジットを使った試験利用から始めることを推奨します。
競合モデルとの比較
フィジカルAI向け世界基盤モデルのオープン化は2026年前半時点でまだ黎明期にあり、競合するクローズドモデル・研究段階モデルとの比較は下表のとおりです。
比較項目 | Cosmos 3(NVIDIA) | Genie 3(Google DeepMind) | JEPA-2(Meta) | Tesla 内製モデル |
|---|---|---|---|---|
オープン性 | 完全オープン(ウェイト公開) | 非公開 | 研究限定公開 | 非公開 |
統合度 | 推論・生成・アクション統合 | 世界生成中心 | 世界モデル研究段階 | 自動運転特化 |
商用利用 | 可能(OpenMDW 1.1) | 未定 | 研究目的限定 | 外部提供なし |
エコシステム | Cosmos Coalition(6社設立) | Google Cloud系 | Meta系に限定 | Tesla内部のみ |
エンタープライズ対応 | NIM(AI Enterprise) | GCP経由 | 未定 | 外部提供なし |
評価基準公開 | 複数のオープン評価あり | 一部公開 | 論文ベース | 非公開 |
差別化の核心: 「完全オープン+商用利用可+推論・生成・アクション統合」という組み合わせは、2026年6月時点でCosmos 3のみが実現しています。Google DeepMind や Meta の競合はいずれもクローズドまたは研究限定の段階にとどまっています。
TPU v8などGoogleが開発する次世代AIチップとの競争文脈については、Googleの次世代AIチップ TPU v8(Sunfish/Zebrafish)の詳細解説もあわせて参照してください。
こんな人におすすめ / こんな人には向いていない
こんな方におすすめ
- ロボット開発者・研究者: ヒューマノイドや産業用ロボットのポストトレーニング・行動計画システムを開発しているエンジニア
- 自律走行AIエンジニア: 合成データ生成でトレーニングコストを圧縮したいチーム
- 産業ビジョンAIエンジニア: 映像監視・品質検査などで複雑な状況推論が必要なシステムを開発する技術者
- フィジカルAI研究者: 世界基盤モデルの最新アーキテクチャを先行調査・研究したいリサーチャー
- VRAM 32GB以上のGPU環境を持つ企業・大学のAI開発チーム: 実際にNano(16B)を動かせる環境がある場合
- エンタープライズ向け産業AIソリューションの構築を検討している企業: NIM経由の本番デプロイを視野に入れた技術検証に
こんな方には現時点で向いていない
- 一般ユーザー: 専用の高性能GPU(VRAM 32GB以上)が必須で、日常的な文章生成・画像生成ツールとは目的が根本的に異なります。ChatGPTやClaudeで十分です
- テキスト・画像生成が主な目的の方: Cosmos 3はテキスト生成AIの代替ではありません。文章・画像生成には特化した他ツールが適切です
- GPU環境を持たない個人や小規模チーム: ローカル実行は困難で、クラウドコストも相応に発生します
- すぐに本番活用したい企業: Edge(4B)は未公開、NIM本番デプロイはAI Enterprise契約が必要、セットアップ難易度は中〜高水準です
- ロボット・自動運転以外の用途が中心の方: テキスト処理・画像生成・音声処理など汎用生成AIには最適化されていません
よくある質問(FAQ)
Q. ロボットを持っていなくてもCosmos 3は使えますか?
A. 使えます。ロボット実機がなくても、合成データ生成や物理シミュレーション、ビジョン推論モデルとして利用できます。ただし高性能なGPU環境は必要です。まずは build.nvidia.com の無料APIクレジットで試験利用から始めることを推奨します。
Q. Cosmos 3は本当に無料ですか?
A. モデルウェイト自体はOpenMDW 1.1ライセンスで無料・商用利用可能です。ただし、実行にはVRAM 32GB以上のGPU(Nanoの場合)または H100 クラスの複数GPU(Superの場合)が必要で、GPU費用が実質的なコストになります。NIM経由の本番デプロイはNVIDIA AI Enterprise契約が必要で有料です。
Q. Cosmos 3 Edgeはいつリリースされますか?
A. 2026年6月時点では「近日公開予定」のみが公式アナウンスされており、具体的なリリース日は発表されていません。最新情報は NVIDIA公式サイト で確認してください。
Q. 以前のCosmos 1.x / 2.xとCosmos 3の違いは何ですか?
A. Cosmos 3はReasonerとGeneratorという2タワー型MoTアーキテクチャを採用しており、推論・生成・アクション予測を1モデルに統合した「第3世代」です。Cosmos 1.x(WFMプラットフォーム、GTC 2025発表)・Cosmos Predict/Transfer/Reason 2.xを統合・発展させたモデルです。ポストトレーニングスクリプトとの互換性については公式の技術ドキュメントを確認することを推奨します。
Q. Cosmos 3とAlpamayo 2 Superはどう違いますか?
A. 同じCOMPUTEX 2026で同時発表されましたが、用途が異なります。Cosmos 3はロボット・ビジョンAI・自動運転など幅広いフィジカルAI用途向けの汎用世界基盤モデルです。一方、Alpamayo 2 Super(32B)は自律走行(ロボタクシー等)に特化した推論VLA(Vision-Language-Action)モデルです。自動運転に特化するならAlpamayo 2 Super、ロボット開発全般や産業AI向けにはCosmos 3が主な選択肢となります。
Q. 日本企業での導入事例はありますか?
A. 公式発表時点(2026年6月)では、Samsung・LG・Doosan Robotics(韓国)、Li Auto(中国)などの海外企業事例のみが確認されています。日本企業の具体的な導入情報は現時点で公式から発表されていません。
Q. OpenMDW 1.1ライセンスとは何ですか?商用利用できますか?
A. OpenMDW(Open Model and Data Weights)1.1はLinux Foundationが管理するオープンモデルライセンスです。商用利用が可能ですが、帰属表示等のライセンス条件の遵守が必要です。Apache License 2.0より制約が多い場合があるため、商用展開前にライセンス原文の確認を推奨します。
まとめ:NVIDIA Cosmos 3 の現時点での位置づけと注目ポイント
NVIDIA Cosmos 3は、フィジカルAI開発の「共通インフラモデル」として2026年6月に登場した世界基盤モデルです。
確認ポイント | 内容 |
|---|---|
対象ユーザー | ロボット・自律走行・産業ビジョンAIの開発者・研究者 |
最大の新機能 | 推論・世界生成・アクション予測の3機能を1モデルに統合(オムニモデル) |
コスト構造 | モデルウェイトは無料、実行GPU費用が実質コスト |
差別化点 | 完全オープン+商用利用可能なフィジカルAI統合モデルは現時点でCosmos 3のみ |
現時点の制限 | Edge(4B)は未公開、Super(64B)は高額GPU環境が前提、セットアップ難易度は中〜高 |
今後の展開 | Cosmos Coalition 経由でのエコシステム拡大、Edge モデルの公開 |
NVIDIA はCosmos 3を「無料のインフラモデル」として広く普及させることで、実行に必要なH100/Blackwellシリーズのハードウェア需要を次世代まで持続させる戦略をとっています。Cosmos Coalitionの設立はそのエコシステム形成の第一歩として位置づけられます。
AIチップ・GPU市場の競争を含むNVIDIAのエコシステム戦略については、Googleが開発する対抗次世代AIチップTPU v8(Sunfish/Zebrafish)の解説、また企業向けAI活用でNVIDIAと連携するエンタープライズAIの事例についてはSAP Autonomous EnterpriseとNVIDIA連携の解説もあわせてご覧ください。
最新の公式情報は以下で確認できます。
- 製品ページ: nvidia.com/en-us/ai/cosmos/
- 技術ブログ: developer.nvidia.com/blog(Cosmos 3)
- 技術レポート(PDF): research.nvidia.com/cosmos3/technical-report.pdf
- GitHub: github.com/nvidia/cosmos
この記事の著者
AI革命
編集部
AI革命株式会社の編集部です。最新のAI技術動向から実践的な導入事例まで、企業のデジタル変革に役立つ情報をお届けしています。豊富な経験と専門知識を活かし、読者の皆様にとって価値のあるコンテンツを制作しています。
最新記事

Claude Fable 5とは?料金・性能・Mythos 5との違いとOpus 5との使い分け【2026年7月最新】
2026/06/10
Claude Mythosが暗号アルゴリズムの新攻撃法を発見|耐量子署名HAWKの鍵強度が実質半減・AES縮小版へのMöbius Bridge攻撃と実運用への影響【2026年7月速報】
2026/07/30

ChatGPT料金は月0円〜3万円|全7プランの価格・利用枠・選び方【2026年7月最新】
2026/03/31

1100人超のAI従業員が開発ペース減速を要請|Pacing the Frontier署名の全内容・再帰的自己改善への警告・アルトマン発言【2026年7月速報】
2026/07/30

OpenClawとは?できること・料金・使い方とClaude Codeとの違い【2026年7月最新】
2026/03/26

Codex・ChatGPT Workの5時間制限が復活|7/29告知・7/30再開とGPT-5.6 Solの18%改善を完全解説【2026年7月速報】
2026/07/30